 |
  
|
Point Data Documentation
|
A Harvester is configured to scan a specified server-side file system directory tree. A pattern can be provided to determine what files should be harvested. The harvester will automatically detect new LiDAR files and load them into RAMADDA. You have the option of leaving the files in place or moving them into RAMADDA's data store.
mcgowan:ls lvis LVIS_Antarctica_2009/ LVIS_Costa_Rica/ LVIS_Arkansas/ LVIS_Greenland/ LVIS_California/ LVIS_NH_Bartlett_Forest/ mcgowan:ls lvis/LVIS_Arkansas/ LVIS_US_AR_2006_20080819.lceThat we want to map into the RAMADDA repository so that the LVIS_... directories are represented with RAMADDA LiDAR Collections and the files are LiDAR Data as shown here.
The Harvester we have set up points to the top-level lvis directory. When it scans it walks the tree down and discovers a file (e.g., LVIS_US_AR_2006_20080819.lce). The harvester creates a LiDAR Collection folder from the parent directory of the file (e.g., LVIS_Arkansas). It replaces any underscore "_" with a space " " and uses that as the name of the collection entry. The file is then ingested and scanned to extract spatial metadata. The new LiDAR Data entry is then created with the parent collection entry.
The NLAS plugin provides a special purpose LiDAR Collection harvester. This harvester type
creates the right kind of folder and entry types for the harvested data.
To create a harvester you need to be a site administrator.
From the Admin->Harvesters page select the New Harvester button.
Enter a name for your harvester and for Type select "LiDAR Collection" in the form:
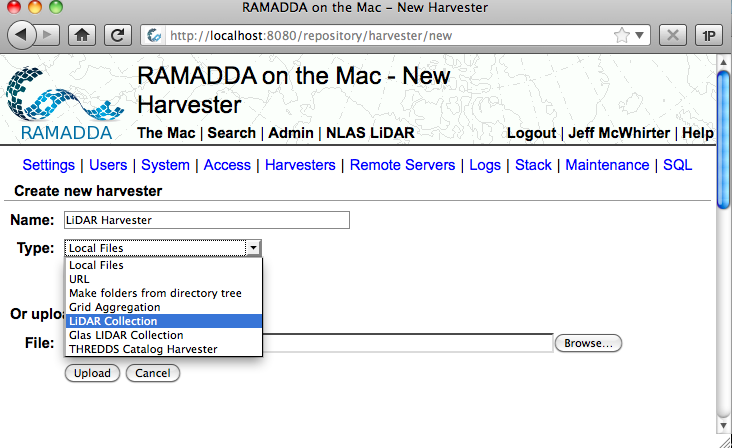
Enter the server file system directory, the destination RAMADDA folder and, optionally, select a LiDAR entry type. The harvester can be configured to automatically run on a specified schedule.